
Subsistemas
Conoce nuestros subsistemas








Motion Control
El subsistema Motion Control es el encargado de innovar en todo lo relacionado con el movimiento, la potencia y las comunicaciones del proyecto Rover. En cuanto al movimiento, trabajamos en algoritmos avanzados para implementar la navegación autónoma en el Rover, permitiéndole desplazarse de una coordenada a otra evitando obstáculos y buscar objetos específicos en áreas determinadas. Además, implementamos mejoras tanto en el código como en la parte electrónica para optimizar la fluidez, el control y la estabilidad en la maniobra del Rover. Respecto al aspecto energético, nos encargamos de proveer la energía necesaria a todos los demás subsistemas para que puedan cumplir con sus actividades. Actualmente, el Rover se alimenta con baterías de polímero de litio; sin embargo, estamos en proceso de desarrollar paquetes de baterías de ion de litio que no solo prolongarán la operatividad del Rover, sino que también serán modulares para facilitar su transporte. Finalmente, el Rover está equipado con una antena omnidireccional que permite maniobrarlo y recibir información de las cámaras y sensores con un retraso muy bajo, a aproximadamente 500 metros de distancia, desde una base equipada con una antena sectorial.
Visión
El subsistema de visión se encarga de crear e implementar el software para las cámaras del rover. Para esto, se ha trabajado en entrenar modelos de machine learning para detección de objetos, generando un código capaz de detectar y leer etiquetas ARUCO, lo que resulta esencial para garantizar la navegación autónoma. Simultáneamente, se ha diseñado y desarrollado un algoritmo capaz de ayudar al piloto del rover cuando este esté guiando el brazo del mismo, lo que es necesario para poder cumplir con misiones de entrega.
Este subsistema cuenta con dos cámaras principales, una OAK-D y una Intel Realsense D435, estas permiten la detección de profundidad y cálculos de odometría. Así mismo, se usan cámaras web las que resultan útiles para ver los alrededores. El propósito de estas cámaras es ayudar al piloto y facilitar el movimiento autónomo del rover.
Brazo
Dentro del equipo de brazo se manejas las capacidades mejoradas del brazo de 6 grados de libertad (6-DOF). Estas derivan de su uso de 6 motores paso a paso estratégicamente posicionados en cada articulación, lo que lo hace notablemente más hábil que los diseños convencionales. Este avance incluye la planificación de trayectorias, la detección de colisiones y el control de la posición individual de cada motor, así como el consumo de energía de los motores. El control del brazo se orquesta a través de una computadora que utiliza MoveIt y RViz para el cálculo de la cinemática inversa, conectada a una Raspberry Pi 4. Además, una nueva interfaz gráfica de usuario (GUI) facilita la operación intuitiva y una interacción más simplificada con el entorno ROS2/MoveIt. La arquitectura del microcontrolador del brazo ha sido renovada, presentando la utilización de 6 Seeduino Xiao para el control de energía individual y el movimiento simultáneo de los motores, lo que resulta en trayectorias más suaves. La cámara integrada del brazo proporciona al piloto coordenadas especificadas de los objetos, lo que mejora las capacidades de manipulación del efector final del brazo. Es notable que, demostrando la destreza y el movimiento preciso del brazo, ahora tiene la capacidad de dibujar imágenes simples especificadas por un archivo gerber.
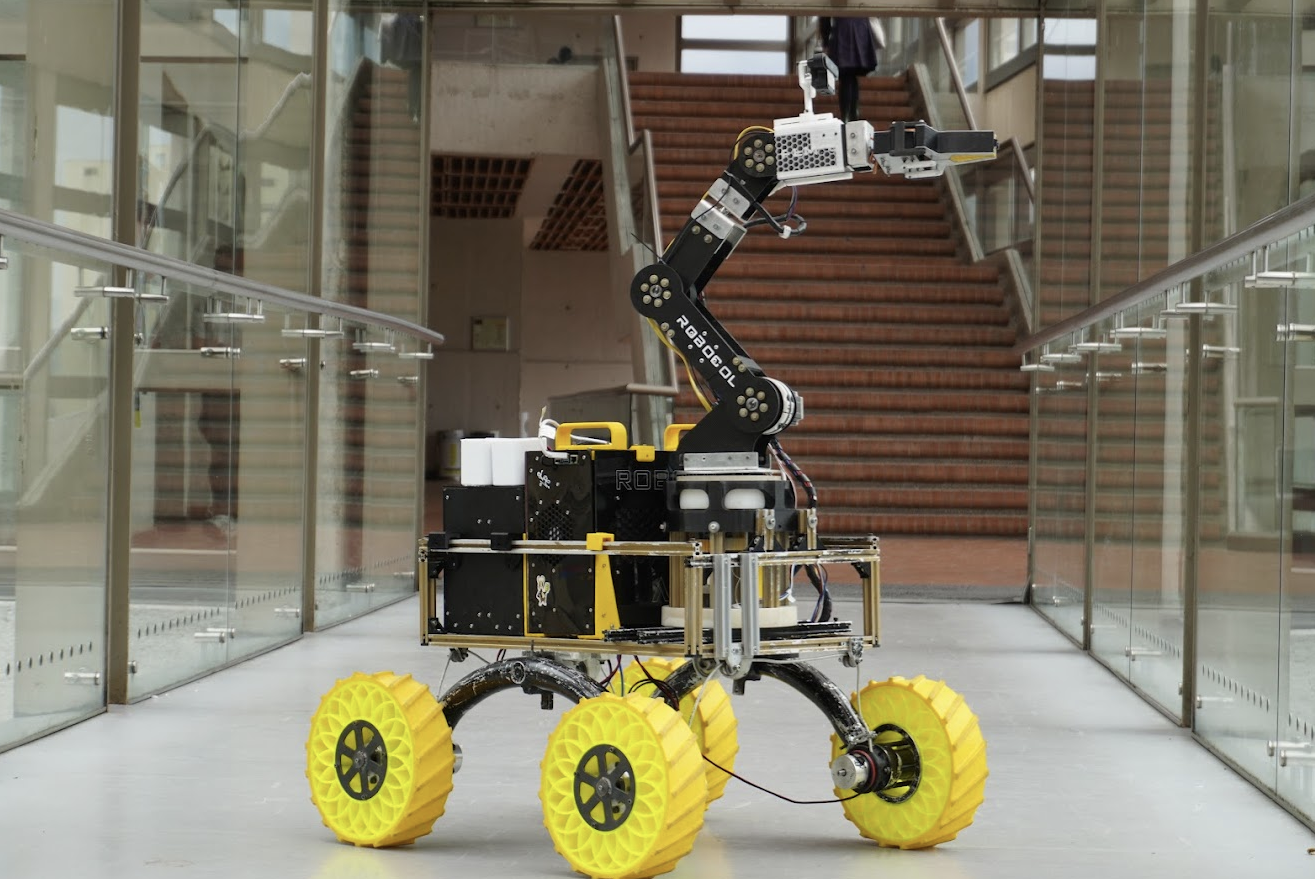
Tracción
El equipo de tracción se encarga de adecuar y proveer al rover con todo el hardware mecánico que requiere para cumplir con cada una de sus tareas. Para el desarrollo de este rover se implementó un chasis hecho con un perfil de aluminio, el cual permite contar con subsistemas modulares. Esto en particular, hace que sea eficiente el intercambio entre el brazo y el hardware del equipo científico. Pivoteado al chasis se cuenta con 2 pares de balancines conectados a un sistema de poleas, las cuales actúan como un diferencial. Esto asegura que el rover cuente con la mayor cantidad de puntos de contacto posibles en cualquier escenario. Conectados a estos balancines se tienen 4 motores con escobillas emparejados con ruedas impresas en 3D personalizadas diseñadas para tener tracción en todos los terrenos posibles, con un enfoque especial en terrenos rocosos encontrados en el suelo de Marte.
Ciencias y sensórica
El subsistema de ciencias diseña y crea los módulos que aseguran los datos necesarios para que el equipo analice y saque conclusiones sobre las condiciones del entorno. Estamos compuestos por dos módulos: R.A.M.S.E.S. (colector y analizador de muestras de superficie), que recoge y filtra muestras hasta el tamaño de grano deseado; E.V.A (evaluador de vida alienígena), que recibe las muestras recolectadas y las distribuye en el laboratorio a bordo según el comando del controlador para proporcionar resultados en tiempo real. El laboratorio a bordo tiene 9 compartimentos que contienen todos los reactivos y un sistema visual para observar los resultados. Paralelamente, se recuperan datos de partículas terrestres y atmosféricas con el uso de dos conjuntos diferentes de sensores calibrados. Todo esto se encuentra en una caja modular y es controlado por 6 PCB especializados, utilizando un Arduino Mega y una Raspberry Pi 4, con la intención de lograr un diseño simple, robusto y eficiente.
Comunicaciones
La comunicación del rover se basa en un puente de red constituido por dos enrutadores, una antena omnidireccional ubicada en el rover, una antena sectorial en la estación base y dos Ubiquity Rocket M2. Esta estructura tiene una frecuencia nominal de 2.4GHz, un ancho de banda de 20 MHz y una tasa de datos permitida de 1.5Mbps. La antena sectorial se coloca en un trípode de gran altitud para evitar interferencias. Las antenas sectoriales y omnidireccionales proporcionan un alcance de 15 dBi y 13 dBi respectivamente. Cyclone DDS es ahora nuestro protocolo de comunicación base y utilizamos una arquitectura basada en UDP para la transmisión de datos, lo que permite un control de baja latencia a más de 500 metros y una conexión adecuada a más de 1 km.
Potencia
Para alimentar el rover, abarcando sus motores, lógica y componentes móviles como el brazo, R.A.M.S.E.S. y E.V.A., junto con cámaras, luces de control y comunicaciones, se implementó un compartimento de energía para incorporar baterías fácilmente reemplazables y garantizar la independencia de energía entre los sistemas. Utilizamos 2 tipos de baterías, baterías LiPO comunes de RC 3S 5.6Ah, específicamente para la lógica del rover, y ahora estamos utilizando nuestros propios paquetes de baterías modulares personalizados para alimentar los motores del rover y el brazo o el hardware de ciencia. Debido a las limitaciones para obtener baterías en nuestro país y para transportarlas en avión, utilizamos células Li-Ion 18650 de 2.9Ah, 3.7V. Conectando 3 celdas, cada una con 3 baterías en paralelo, logramos un paquete de baterías de 100Wh, el límite para viajes en avión. Al estar diseñadas para un uso modular, podemos conectarlas en paralelo o en serie, para lograr las especificaciones de potencia que necesitamos sobre la marcha. Ahora podemos lograr más de 2 horas de autonomía.
Web Dev
El subsistema de Web Dev se encarga del desarrollo de una interfaz capaz de controlar el rover de manera fácil y sencilla. La finalidad de esta interfaz es mejorar la experiencia de uso y facilitar el desarrollo de misiones del rover al unificar los procesos que este desarrolla.
Momentos Rover