-
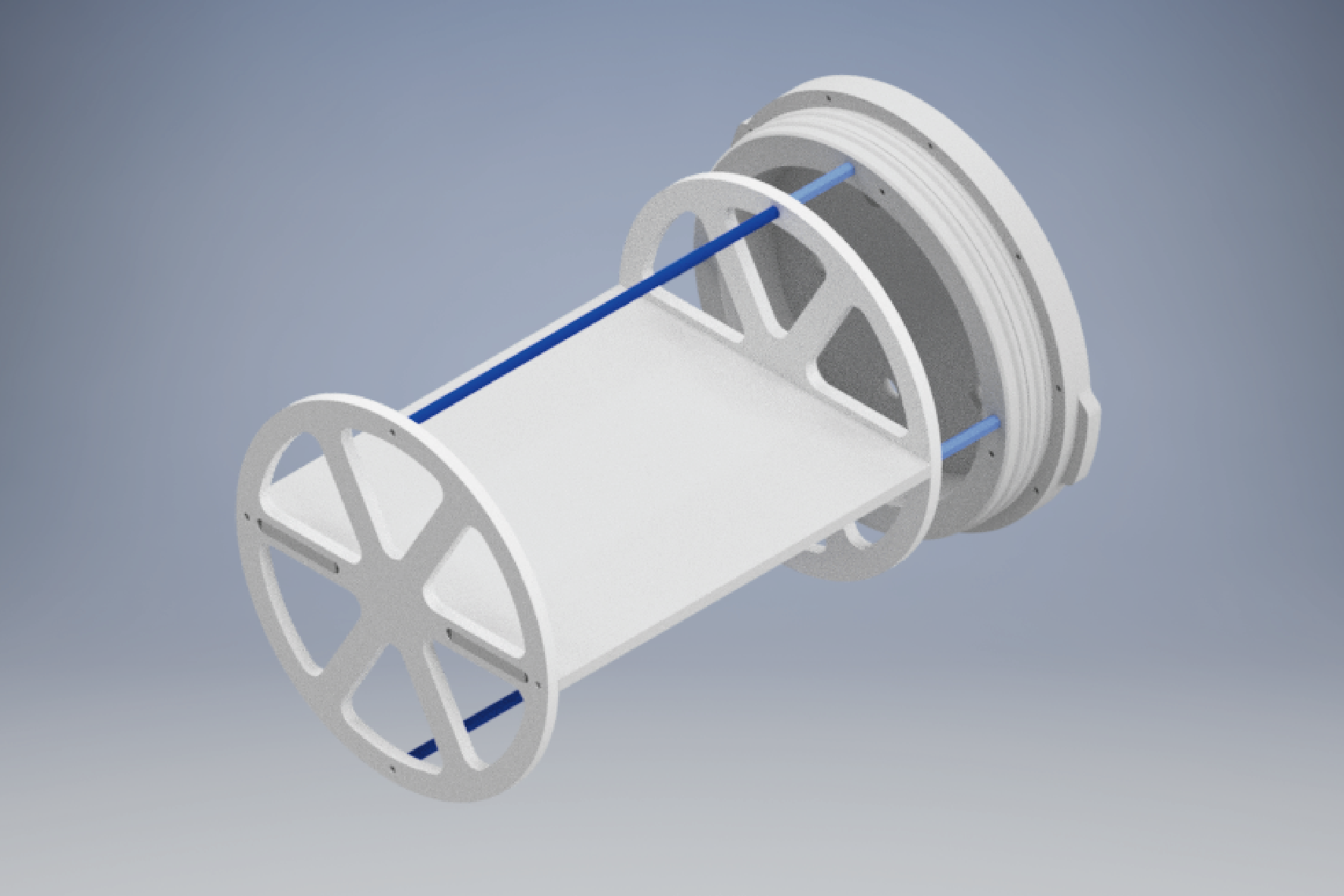
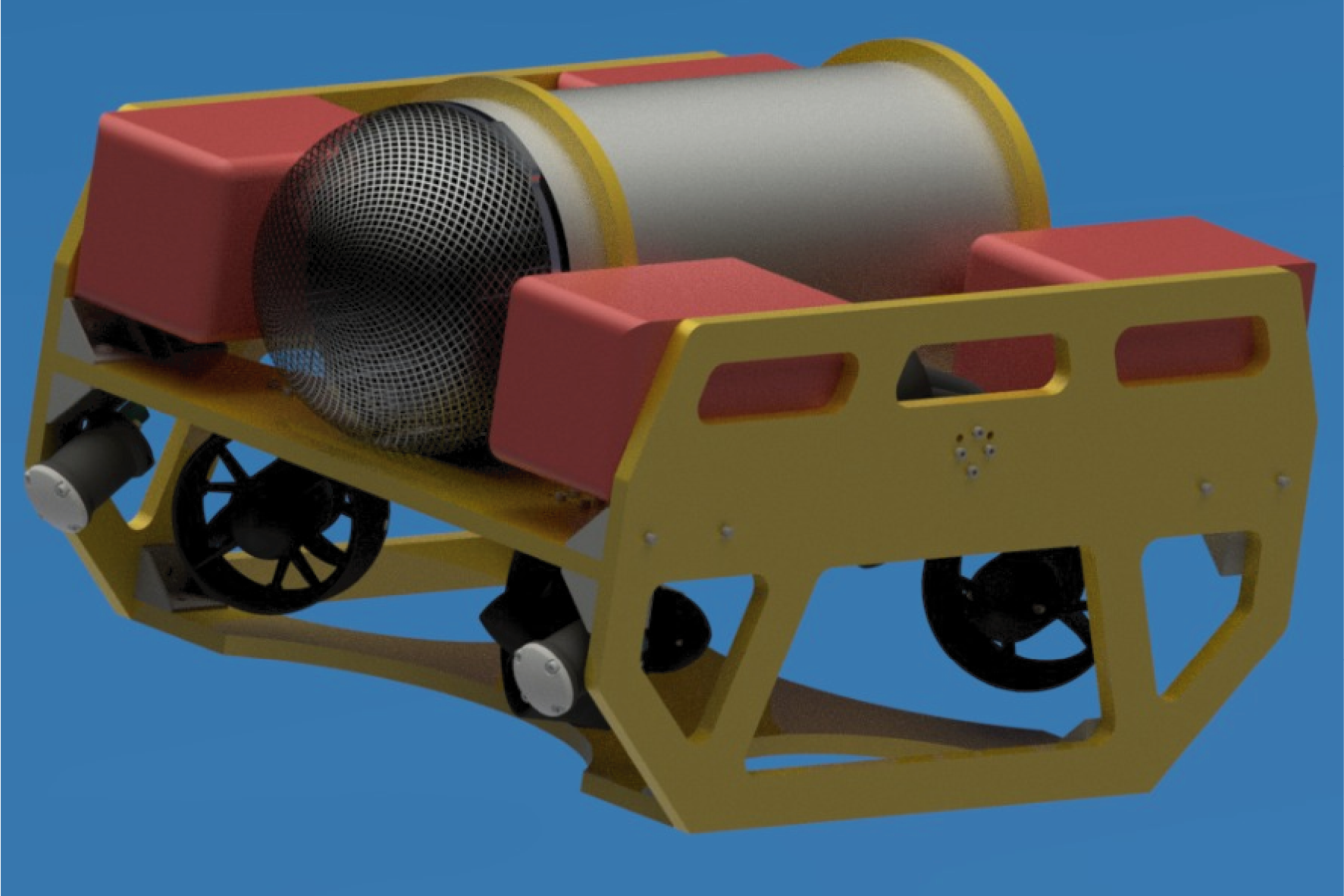
It enables the submarine to achieve neutral buoyancy.
-
The tanks give the possibility to change the density according to the requirements of the task at hand.
-
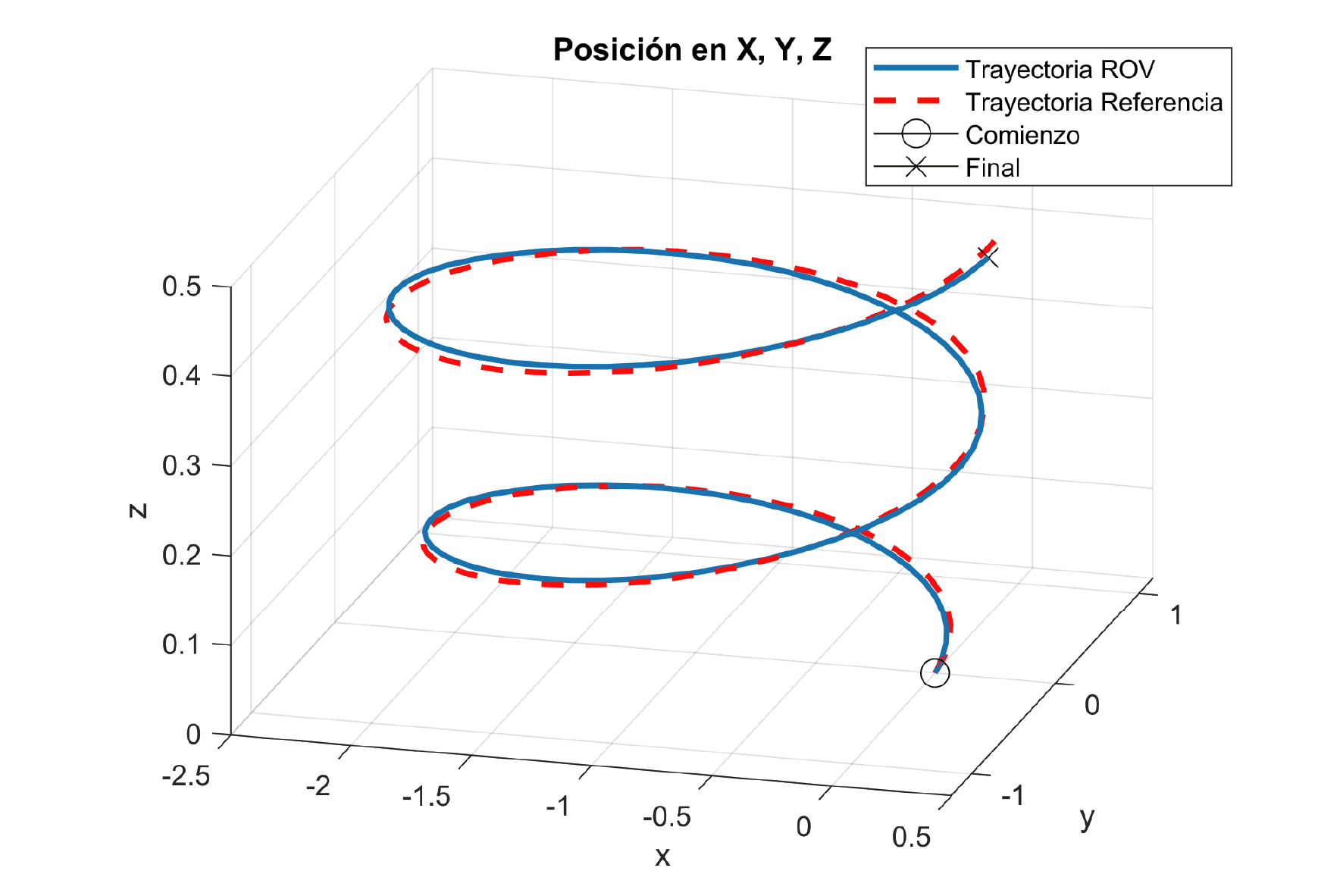
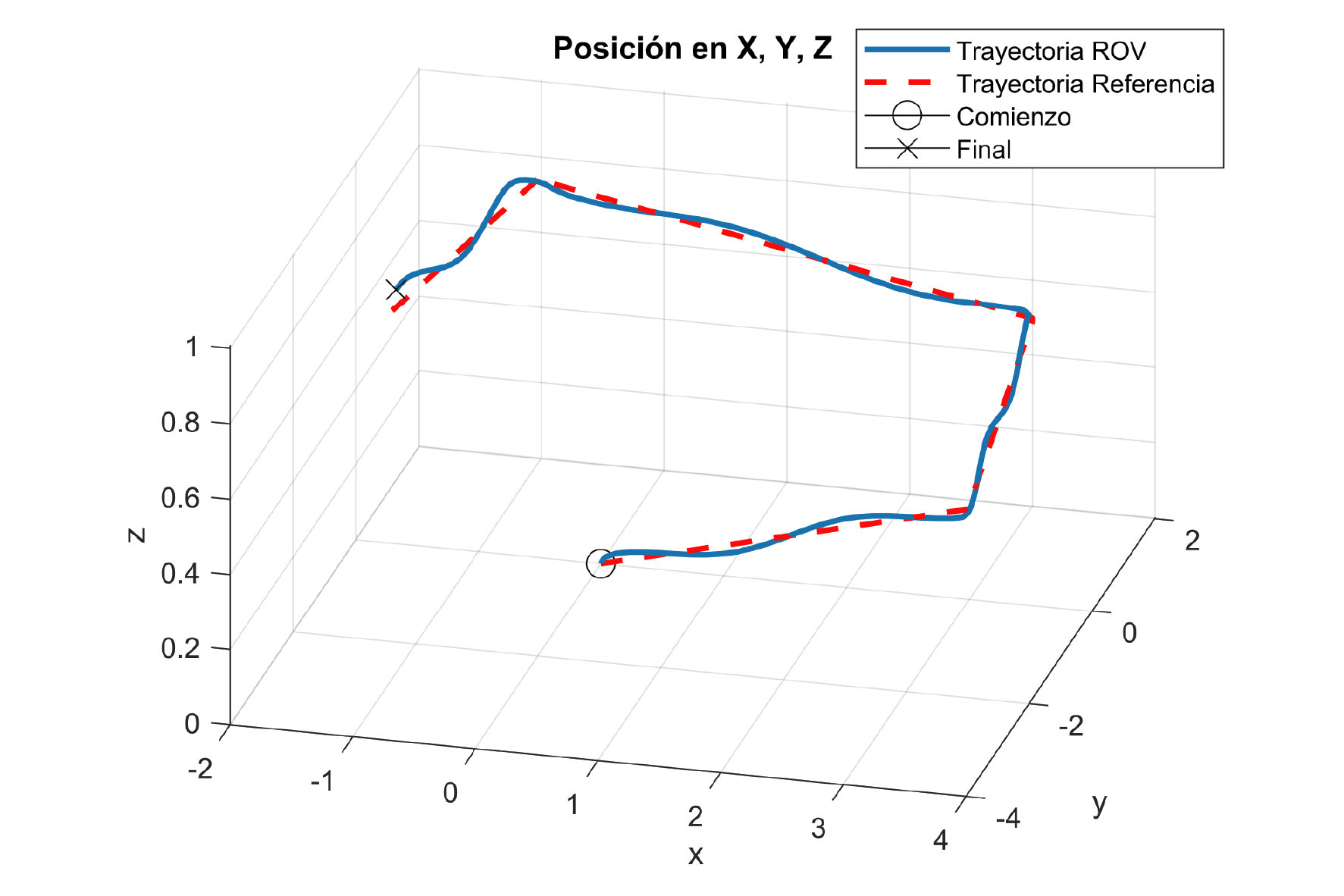
Allows the system to be modular and adaptable to different routes in a three-dimensional environment.